Libraries
Comprehensive X2C Libraries for Efficient Modeling and Control
X2C provides extensive libraries for Xcos and Simulink – including Basic, General, Math, Control, MotorControl, and StateControl.
These libraries offer all essential function blocks for modeling, signal processing, and control tasks.
If custom blocks are required, they can easily be created using the X2C Block Generator. The block implementation – whether fixed-point (16/32 bit) or floating-point (32/64 bit) – can be conveniently selected via a dropdown menu and mixed within the same model. The chosen implementation is independent of the target hardware architecture.
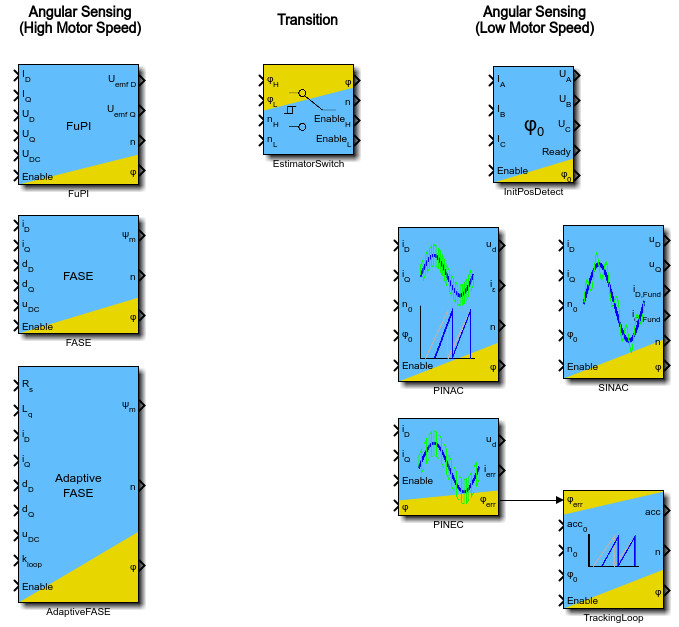
X2C MotorSensorless Library
The MotorSensorless library contains blocks for field oriented control of permanent magnet synchronous motors without angular sensor.
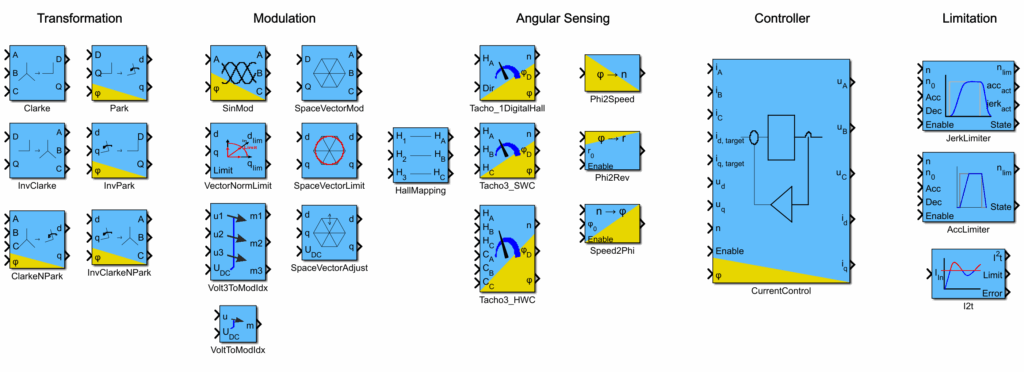
X2C MotorControl Library
The MotorControl library contains blocks for creating field oriented control algorithms for permanent magnet synchronous machines (PMSM).
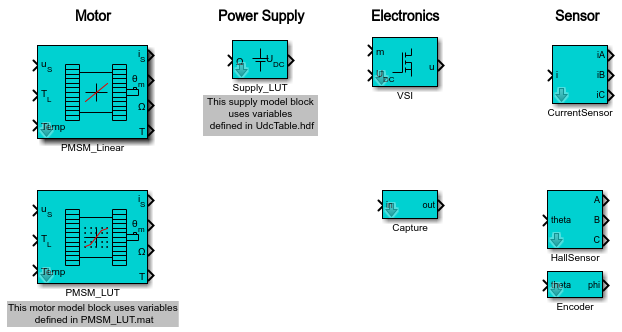
X2C MotorSimulation Library
The MotorSimulation library is part of the MotorControl library and contains blocks for simulation of the hardware in the motor control loop.
Note: This library is only available for Matlab/Simulink.
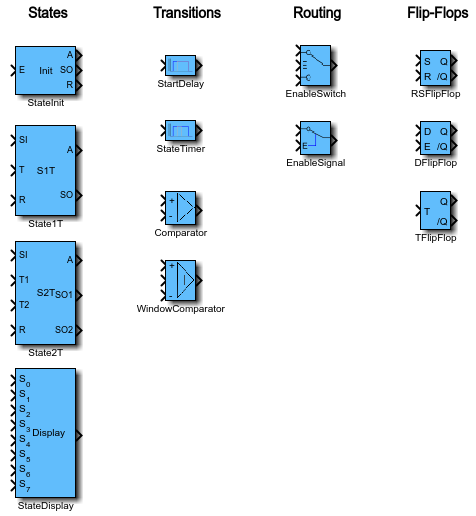
X2C StateControl Library
The StateControl library contains logic blocks and blocks for creating simple state machines.
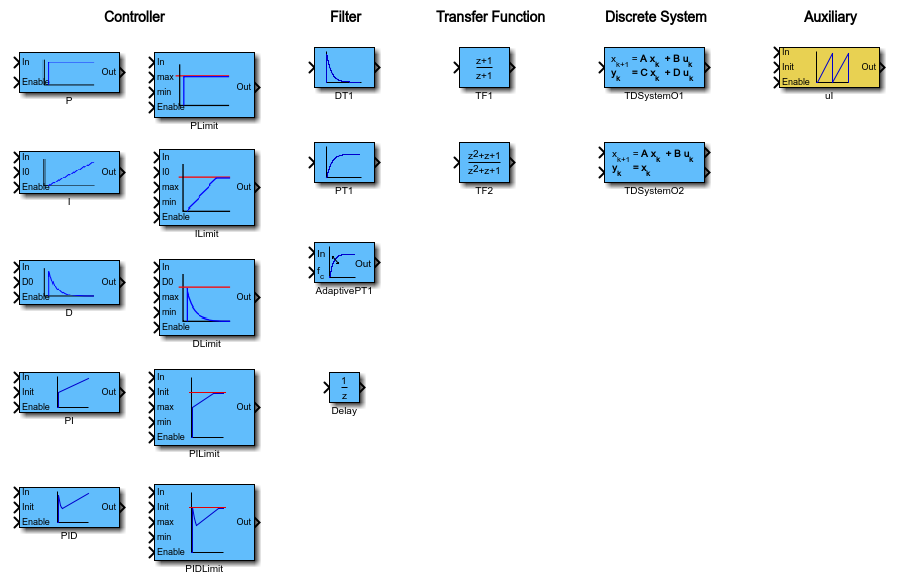
X2C Control Library
The Control library contains blocks for creating control algorithms.
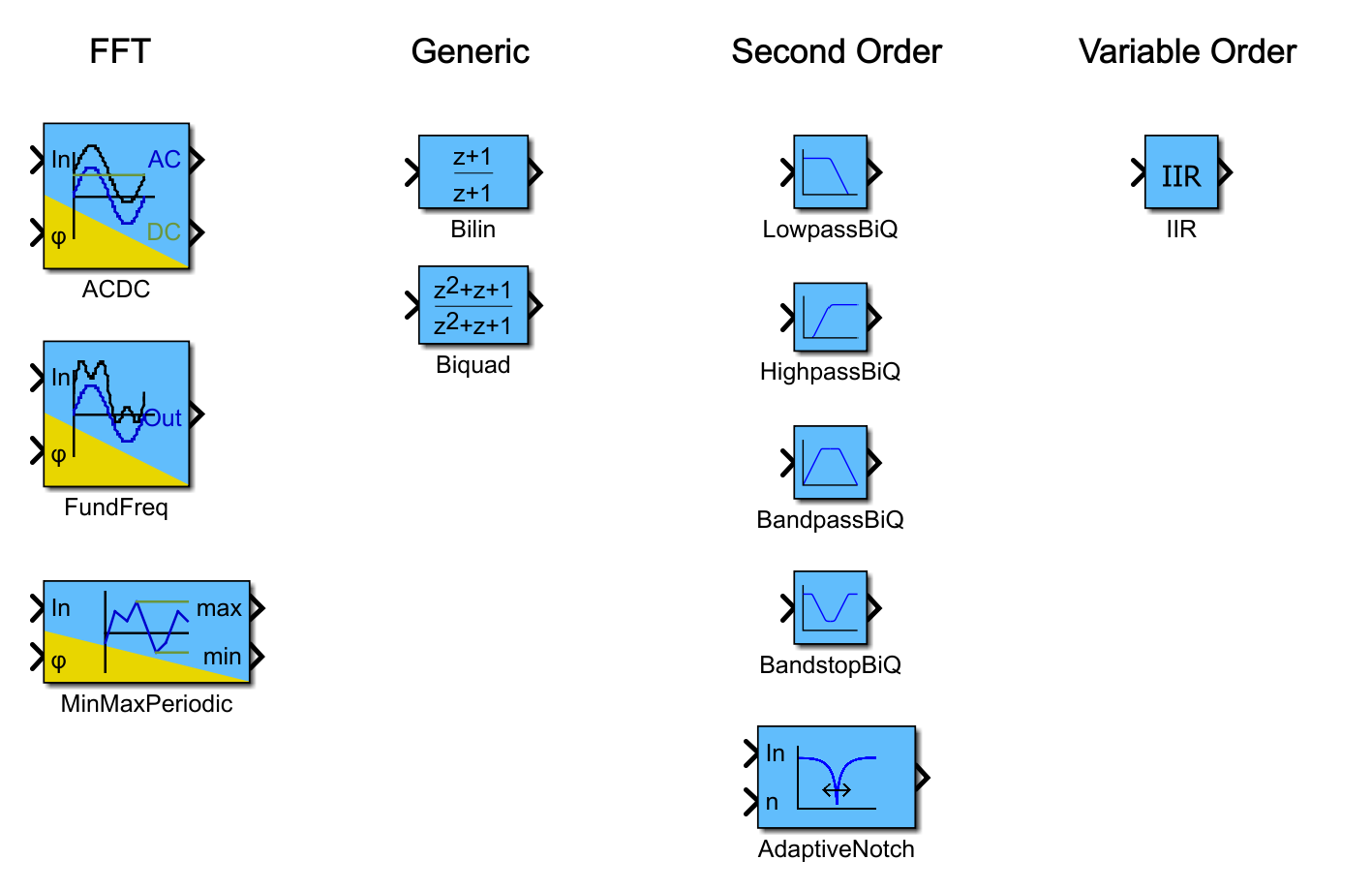
X2C Filter Library
The blocks in the Filter library can be used for signal conditioning.
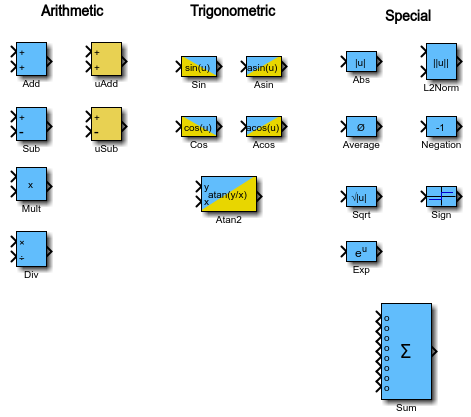
X2C Math Library
The Math library contains blocks with mathematical functions.
X2C General Library
The General library contains general purpose blocks.
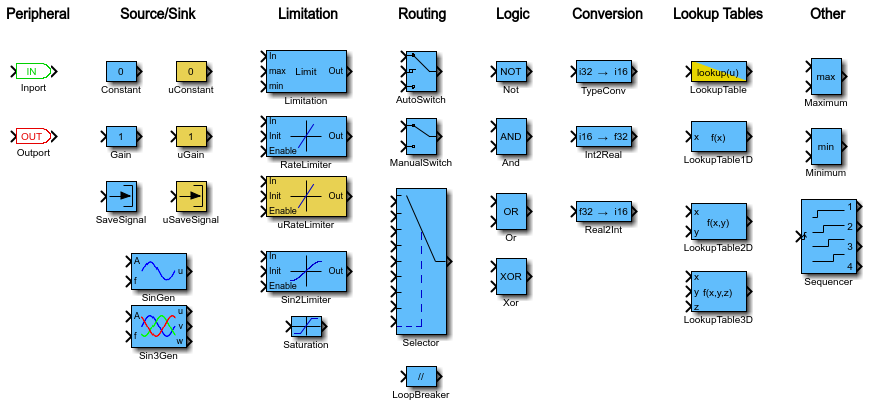
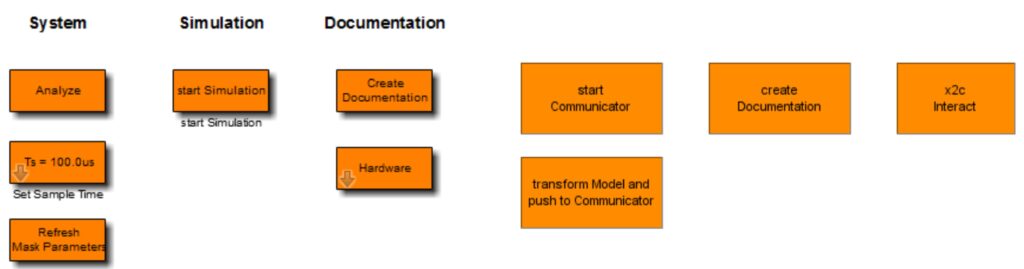
X2C Basic Library
The Basic library contains system blocks for configuration of the X2C model and to ease the work flow. Model configuration is slightly different in Matlab/Simulink and Scilab/Xcos, so the Basic library differs for Simulink and Xcos.

Peter Dirnberger
Teamlead E-Drives